找出平面上的特殊无向图中的所有三角形的算法
文章目录
问题提出背景:在非结构化三角形网格生成过程中,若采用前沿推进法,在推进过程中是不好构造三角形的(而且也没有要),最好在把所有的边都连好以后再找出所有三角形,于是提出了问题:在由三角形构成的平面无向图中如何找出所有三角形?
网格如图:
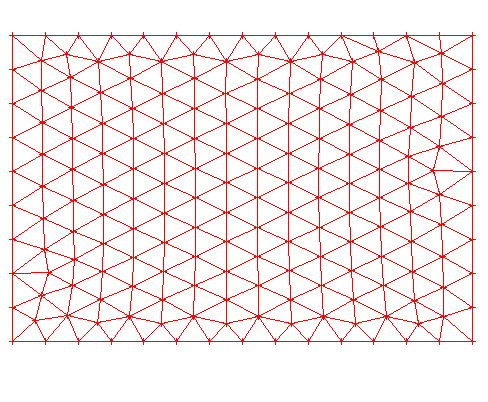
要注意的是,这个无向图很特殊,
1.这个图在平面上。
2.这个图是由三角形构成的(如果不是由三角行构成,那这个网格就没有用处了)。
我的算法如下,伪代码表示:
|
|
算法的关键在于uniqPointOfTriangle( )和uniqPointOf2Points( )这两个函数。
这两个函数的原理相同, uniqPointOfTriangle( )uniqPointOf2Points()唯一的作用是
它的一个性质: 输出和输入参数的顺序无关。
如果没有这两个函数的判断,每个三角形会被输出6次,而有了这两个函数的限制后,强制在3个元素的6中排列中指定1种,
就消除了重复。
uniqPointOfTriangle的实现我想了一个邪恶的办法:
|
|
还有一种正常一点的办法:
思路是:对三个点,先在x方向找出最小的点,若有一个,直接返回;若有两个,找出y方向小的那个返回。
另外,这样输出的三角形中其内部可能有其他的点,若要消除,再加上一层过滤,去除掉那些”p有邻点在p,np,nnp三角形中的”情况即可,
这是因为这个图由三角形构成的特殊性质,如果有在p–np–nnp中有点,假设这些点都不和p相连,那么,
这些点和p-np, p-nnp构成的区域必然不是三角形!所以可以这样干。